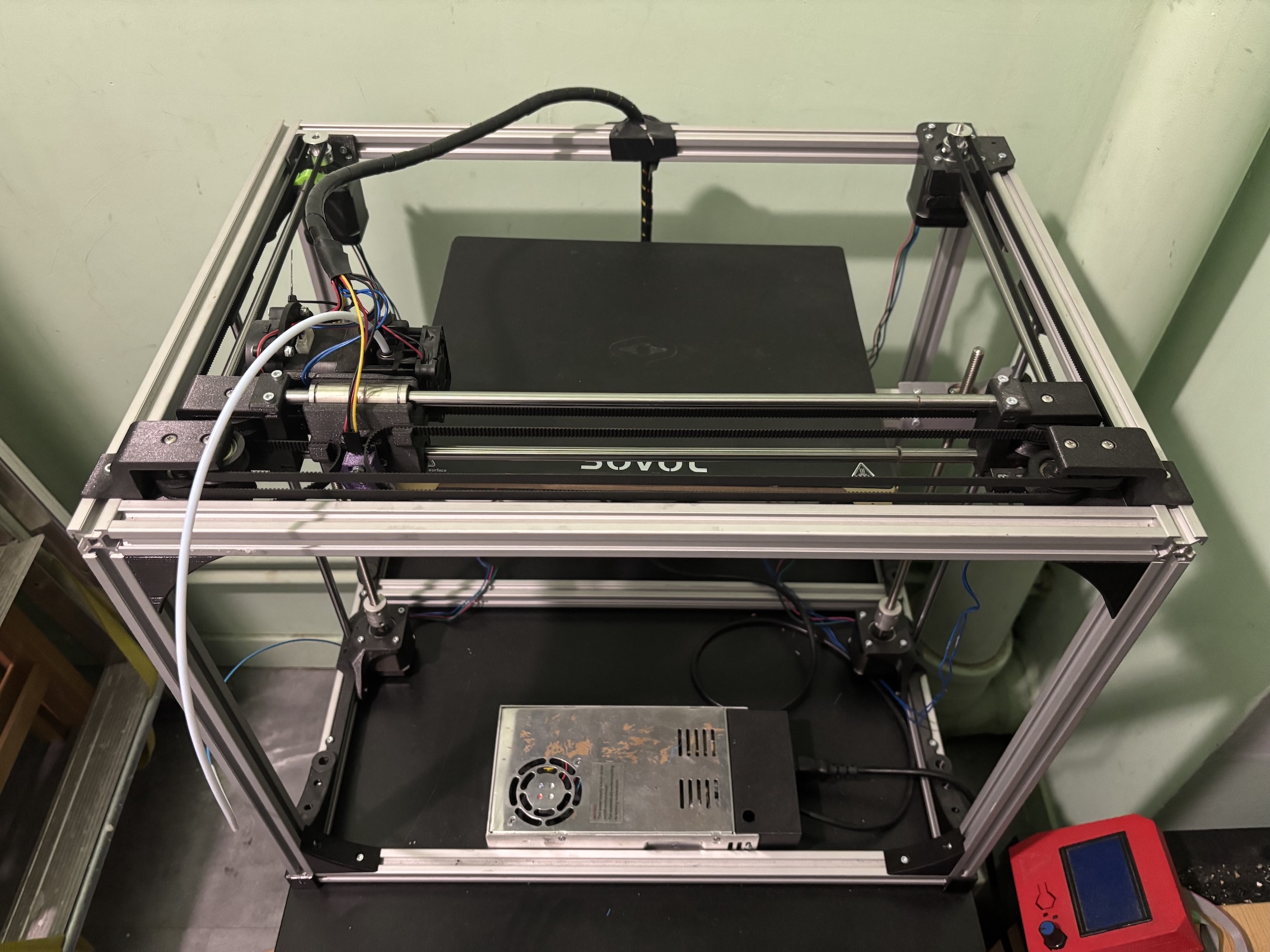
Pour réaliser ce robot, j'ai conçu le châssis, à l'aide de Fusion360, puis l'ai imprimé en 3D. Il est piloté par une arduino RP2040, qui est connectée à un routeur WiFi. Le robot est contrôlé par Unity3D sur un ordinateur qui envoie les commandes au robot via le réseau local.
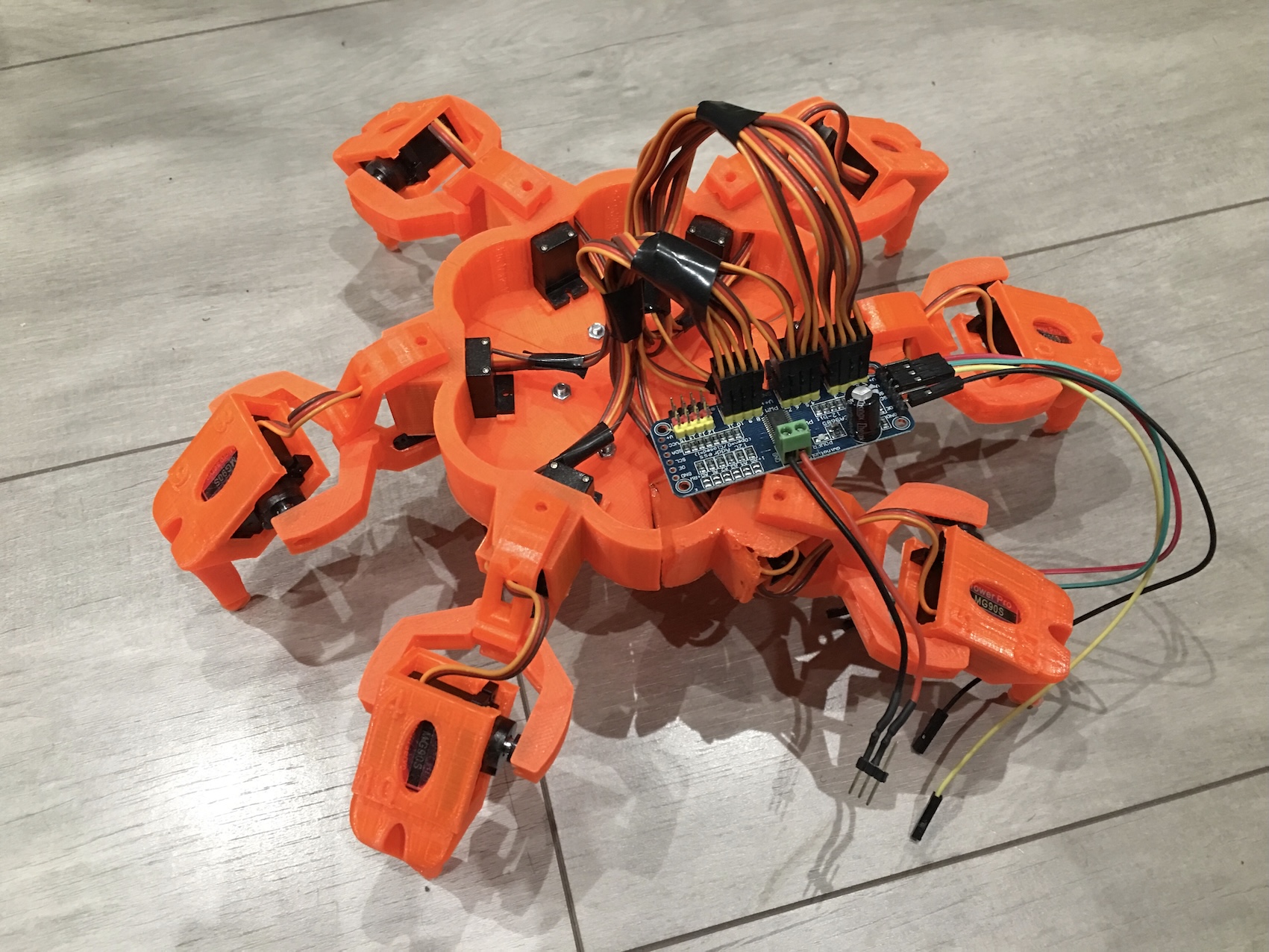
J'ai aussi réalisé d'autres petits robots avec des pattes, comme des hexapodes ou un autre petit robot à 4 pattes.